Robotic systems have made significant advancements in recent years, with a primary focus on indoor environments such as warehouses, airports, and offices. These robots have been designed to assist humans with manual tasks and provide simple responses to inquiries. However, the future of robotics may involve the deployment of these systems in unknown and unmapped environments, where obstacles can obstruct their sensors and increase the potential for collisions. Air-ground robots, in particular, have shown promise in navigating outdoor environments and handling complex tasks that require mobility in both the air and on the ground.
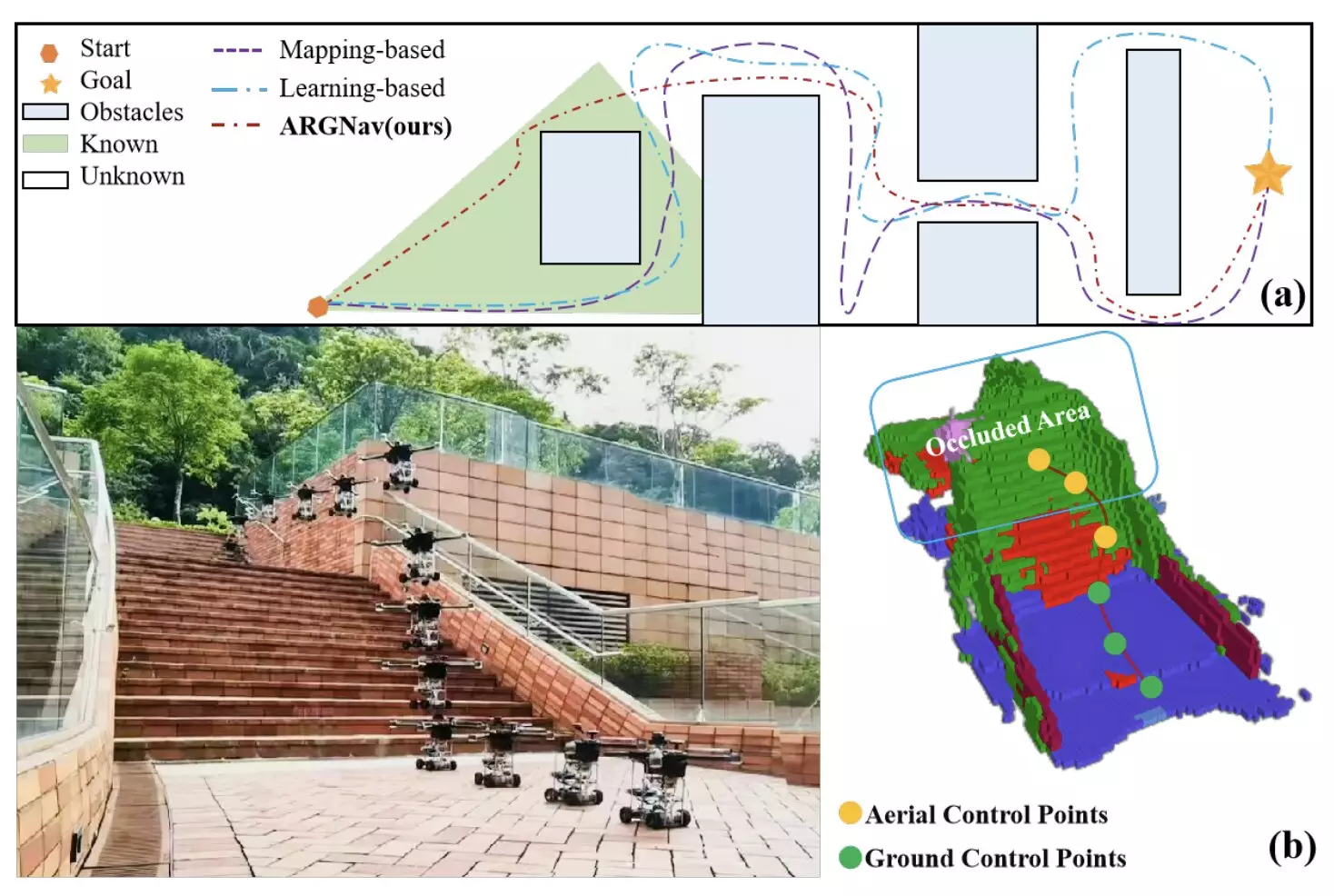
Researchers at the University of Hong Kong have developed AGRNav, a cutting-edge framework aimed at enhancing the autonomous navigation of air-ground robots in occlusion-prone environments. This innovative framework incorporates a lightweight semantic scene completion network (SCONet) and a hierarchical path planner to predict obstacle distributions and plan energy-efficient paths for robots in challenging settings. The deep learning approach used by SCONet enables accurate obstacle predictions while the hierarchical path planner optimizes the robot’s movement for reaching predefined locations.
The study conducted by the research team demonstrated the effectiveness of AGRNav in both simulations and real-world experiments. By applying the framework to a customized air-ground robot, the researchers were able to outperform existing navigation frameworks and identify optimal paths for efficient navigation. The open-source code of AGRNav is available on GitHub, allowing developers worldwide to access and integrate this advanced navigation system into other air-ground robotic platforms for testing and deployment in real-world scenarios.
While AGRNav has shown promising results in enhancing navigation for air-ground robots, there are still challenges that need to be addressed. Unknown and occluded regions in environments pose significant obstacles for autonomous systems, highlighting the need for continuous improvement and refinement of navigation frameworks. Future research could focus on further enhancing the predictive capabilities of AGRNav to adapt to dynamic environments and unforeseen obstacles, ensuring the safe and efficient navigation of air-ground robots in complex outdoor settings. Deploying and testing AGRNav on a broader range of robotic platforms will be crucial in validating its effectiveness and contributing to the advancement of robotic systems in real-world applications.