Utilizing teams of robots in research has the potential to revolutionize the field, allowing for more elaborate missions and quicker data collection. The combination of reliable hardware and software can open up a world of possibilities for researchers, including covering long distances faster, visiting multiple sites simultaneously, and monitoring larger areas. Platforms like the Cambridge RoboMaster provide a solid foundation for multi-robot research, offering the tools needed to test robot teams in specific real-world settings.
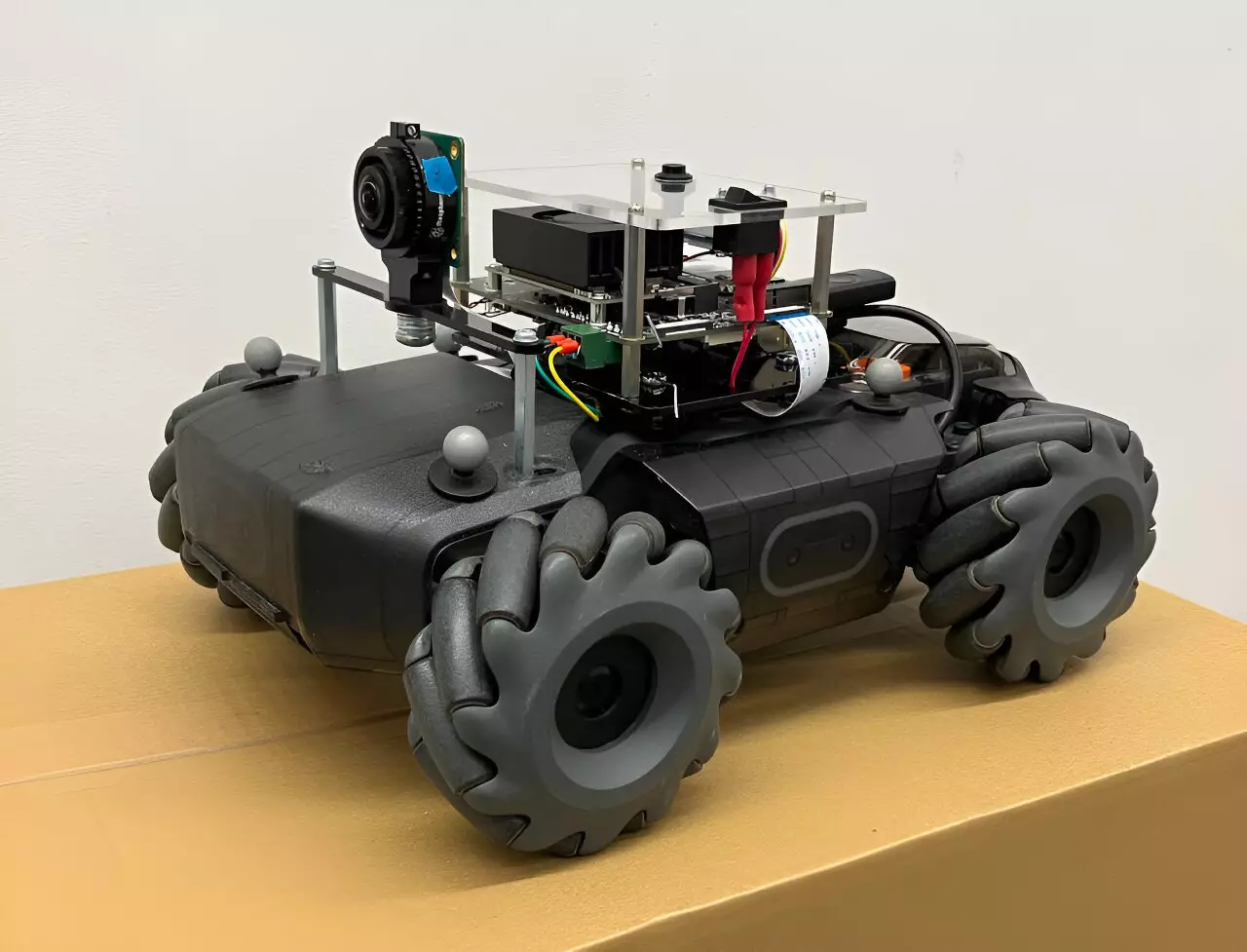
The development of the Cambridge RoboMaster platform by researchers at the University of Cambridge showcases the importance of having state-of-the-art computing power, speed, agility, and durability in a multi-robot research platform. By customizing DJI RoboMaster S1 robots to meet their specific needs and continuously iterating on the platform over the past three years, the researchers have created a versatile tool for conducting experiments in multi-robot and multi-agent systems. The introduction of the platform in their recent paper, complete with hardware designs, source blueprints, and software, allows other researchers to experiment with teams of RoboMaster robots and push the boundaries of what is possible in the field.
The Cambridge RoboMaster platform offers a unique combination of size, capabilities, and affordability that sets it apart from other robotic platforms. By overcoming the limitations of both smaller and larger robots, the customized DJU RoboMaster S1 robots strike a perfect balance between agility and power. With a custom controller pushing the platform to reach a top speed of 4.5 m/s, the compact and powerful robotic platform is an ideal testbed for multi-robot experiments in indoor environments. The platform’s control stack for full on-board autonomy and peer-to-peer communication, combined with its ability to run multi-agent reinforcement learning policies directly from the simulation framework, makes it a valuable tool for testing algorithms applicable in multi-agent navigation.
The cost-effective nature of the Cambridge RoboMaster platform, priced at around $700, makes it accessible for researchers and ideal for a wide range of research demonstrations and practical applications in multi-agent systems. The platform’s combination of affordability, advanced capabilities, and versatility allows for rapid integration into experimental work in academic and research settings. By testing algorithms for the planning of multi-robot missions, researchers can explore automated transport logistics, environmental monitoring, and search and rescue missions using the Cambridge RoboMaster platform.
Looking ahead, the researchers behind the Cambridge RoboMaster platform have exciting plans to further enhance the platform’s capabilities. By focusing on improving on-board sensing, decentralized communication, and control, the researchers aim to push the limits of multi-robot and multi-agent systems research. Additionally, the platform could serve as a bridge for deploying research to drones, expanding its potential applications even further. With the hardware, software, and simulation tools necessary to start experimenting with the platform readily available on GitHub, research groups worldwide can collaborate and innovate in the field of multi-robot research.