Recent research published in *Scientific Reports* highlights a significant leap in the design and production of fabric-based soft pneumatic actuators (FSPAs). These innovative devices possess the ability to deform and move when subjected to pneumatic pressure, making them vital components in the burgeoning field of soft robotics. Unlike traditional rigid robotic systems, which can pose safety risks, FSPAs are inherently safer due to their soft and flexible nature. This unique characteristic enables them to interact seamlessly with delicate objects and humans alike, making them prime candidates for various applications, including wearable technology, adaptive structures, robotic manipulators, and assistive devices.
However, the development of FSPAs is fraught with obstacles, particularly in the design and manufacturing phases. The essential challenge revolves around achieving the desired shape morphing capabilities while keeping the manufacturing process simple and cost-effective. Addressing these hurdles, a collaborative research team consisting of Dr. Masato Tanaka, Dr. Tsuyoshi Nomura, and Dr. Yuyang Song has sparked a transformation in the fabrication of these essential components.
At the heart of this research lies the application of Alan Turing’s morphogenesis theory, which posits that patterns in nature can emerge from a stable equilibrium. Turing’s theory, established in 1952, offers insights into how complex patterns—ranging from stripes found in zebras to spirals in shells—can result from the interplay of reaction-diffusion systems. The researchers’ objective was to tap into these concepts to devise a methodology that would allow for a more effective design structure for FSPAs.
Dr. Tanaka stated that this initiative stemmed from the growing demands within the soft robotics community for more advanced pneumatic actuators that can execute controlled movements without necessitating specialized materials or complex technologies. Inspired by Turing’s notion, the research team employed a gradient-based orientation optimization method. They sought to create anisotropic membranes—surfaces that vary in properties according to direction—to enhance the ability of the actuators to perform complex movements.
The traditional approach to designing pneumatic actuators typically incorporates isotropic materials that behave uniformly, which can be limiting. This requirement often leads to laborious trial-and-error methodologies during the design phase to achieve the desired material properties. The research team’s breakthrough lies in their automated process, which minimizes the need for extensive testing and allows for the creation of designs that exhibit superior control and functionality.
By leveraging Turing patterns, the team established an innovative pathway that reconciled the complexities of anisotropic material design with modern fabrication methods, such as 3D printing. Dr. Yuyang Song noted that by optimizing the orientation of the textile fibers within the actuator, they could generate specific thermal and mechanical properties that mimic the desired movement without compromising structural integrity.
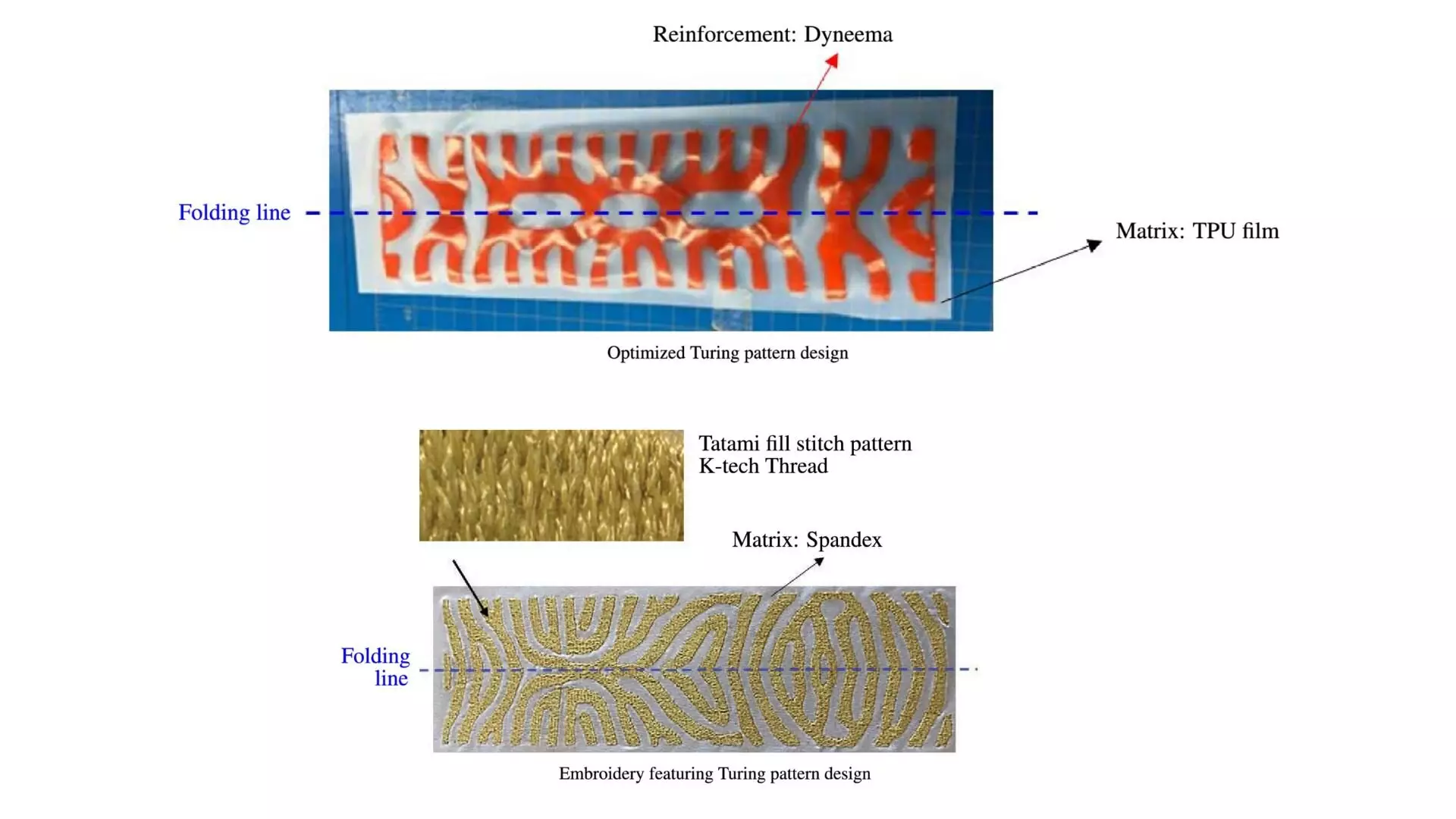
To actualize their designs, the researchers experimented with two principal fabrication techniques: heat bonding and embroidery. In the heat bonding technique, they utilized advanced fabrics such as Dyneema, which were meticulously laser-cut into the desired Turing patterns before being bonded to softer materials. The embroidery method, on the other hand, involved embedding the Turing patterns into a soft fabric using robust threads, creating different stiffness regions that facilitated controlled motion.
Both of these innovative techniques promise scalable and cost-effective methods of producing FSPAs, opening avenues for mass production while establishing new benchmarks in actuator design. Preliminary assessments show that the Turing pattern models outperformed traditional designs in certain metrics, such as C-shaped movements, where a significant reduction in edge distances was achieved.
The implications of this research extend beyond the mere optimization of existing designs. The researchers envision further integrating Turing patterns with next-generation materials such as shape memory alloys and electroactive polymers. Such ventures could yield even more sophisticated actuators capable of intricate movements and dynamic responses. Furthermore, the team’s forward-thinking approach involves scaling fabrication technologies to potentially revolutionize the mass production of larger and more capable actuators.
The exploration of Turing patterns in the context of FSPAs signifies a vital advancement in soft robotics. The approach does not merely enhance the functionality of pneumatic actuators but also lays the groundwork for future innovations in various fields, capitalizing on the principles of nature to inform cutting-edge technology.