Robotics has traversed an exciting journey, predominantly within the automotive sector, where precision and consistency have greatly benefited from automation. In recent years, however, the realm of robotic applications has begun to expand into diverse fields such as logistics, healthcare, and even space exploration. As we witness this transformation, it becomes clear that the current state of robotics is still hampered by certain limitations. Predominantly, contemporary robots are designed for repetitive tasks, often executing motions in a fixed sequence, which restricts their ability to adapt dynamically to varying environments and scenarios. To foster a future where robots can operate more effectively in unpredictable settings, a paradigm shift—toward developing human-like capabilities—becomes imperative.
Alessandro Saccon, an Associate Professor at Eindhoven University of Technology, recently concluded the I.AM project, which focused on enhancing robots’ capacity for rapid physical interactions. This initiative is particularly pertinent for tasks that present safety concerns for humans, such as lifting heavy luggage at airports, navigating hazardous zones in a nuclear facility, or performing rescue operations in disaster-stricken areas. Saccon’s work underscores the necessity for robots to not only complete tasks but to do so in a manner that incorporates a sophisticated understanding of their environment—especially in scenarios that require swift reactions to changing circumstances.
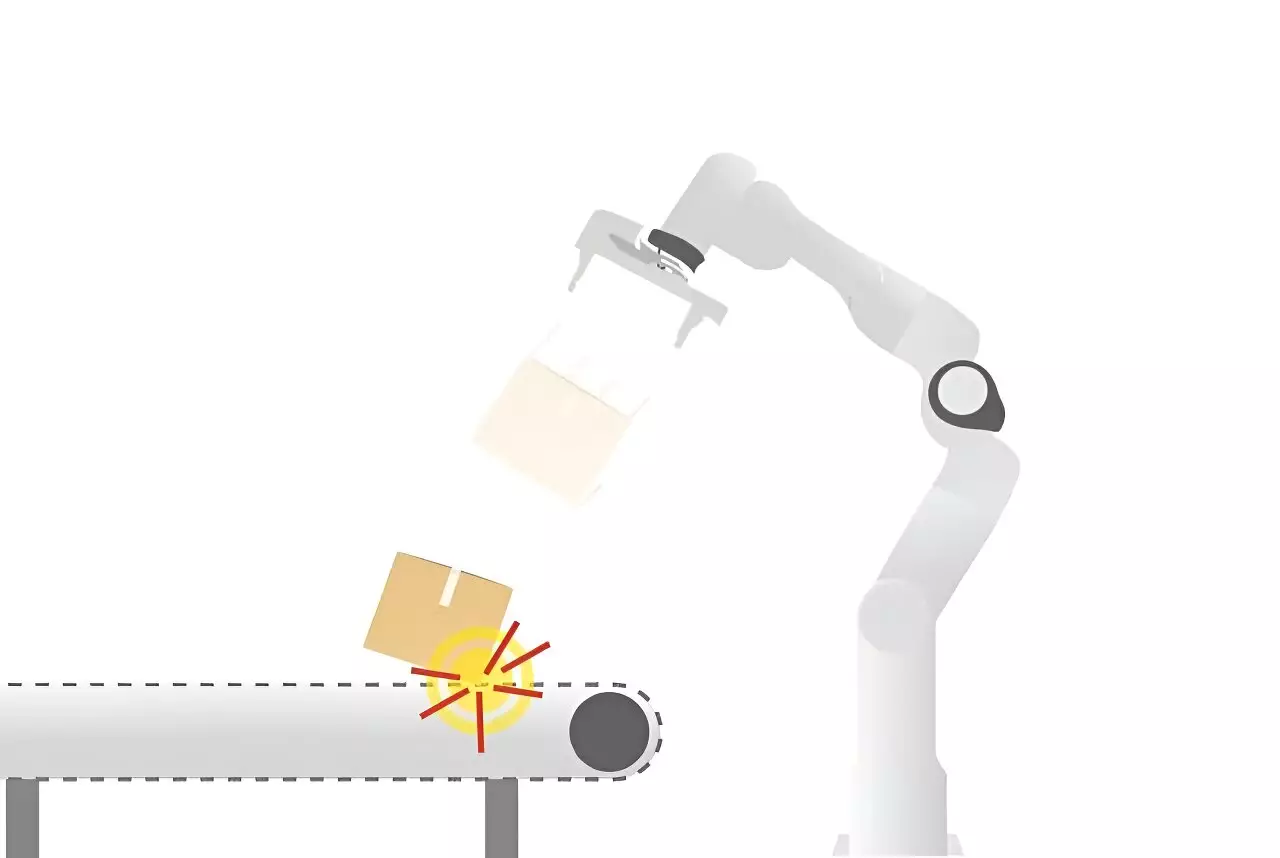
Traditional robotics heavily prioritizes collision avoidance, often viewing contact with objects as undesirable. In contrast, the I.AM project embraced what Saccon calls “collision exploitation.” This innovative approach encourages robots to engage dynamically with their surroundings, allowing them to swiftly and safely grasp heavy objects while maintaining reliability even amidst disturbances and inconsistencies. This advancement provides an intriguing glimpse into a future where robots can function effectively alongside humans, taking on tasks that currently pose operational risks.
One of the significant hurdles faced by developers in this field is how to endow robots with the ability to make predictions and adaptations in real-time—skills that come naturally to humans. For instance, if a robot misjudges the weight of an object due to distorted data or a slight miscalculation in spatial positioning, it must possess the acuity to adapt its movements accordingly to prevent failure or accidents. Saccon’s research delves deeply into how to build systems that can execute complex motions with an understanding of impact dynamics, effectively arming robots with the tools to operate independently and intelligently.
Using first-principle physics, the I.AM project effectively integrated fundamental concepts such as mass and friction while deploying simulations to bridge the gap between theoretical models and real-world performance. By collecting real-time data from robots engaging with various objects across diverse scenarios, researchers were able to refine their algorithms significantly. This iterative process has proven vital in establishing how robots can more reliably and swiftly secure heavy items with multiple gripping points, showcasing progress toward human-like dexterity and contextual understanding.
Saccon’s collaborations extended beyond academia; he engaged with industry leaders like VanderLande, a significant logistics automation firm. Insights gained through this partnership enriched the research, allowing for practical applications that directly address existing bottlenecks in the robotics sector. A notable outcome of this collaboration was the establishment of a shared laboratory space on the TU/e campus, promoting hands-on testing among students and researchers. Engagement with real-world challenges and solutions cultivates an enriching learning environment; it not only enhances the practical knowledge of students but also strengthens the innovation pipeline in industry-focused robotics.
As the landscape for robotics continues to evolve, the Netherlands is positioning itself as a leader in the field. With contributions spanning medical robotics to mobile applications, the emphasis on impact-aware robotics reflects a significant step forward in addressing the complexities of autonomous behavior. Saccon acknowledges the robust interest generated globally by the project, affirming its status as a crucial player in advancing the dialogue around robotic capabilities.
Moving forward, there are various avenues for exploration, particularly in enhancing fast planning and spatial perception. Maintaining strong ties to industrial partners and focusing on interdisciplinary collaboration will be instrumental in evolving these technologies further. The societal implications of advancing robotics are profound, yet they come with the responsibility of ensuring that these systems augment human capabilities rather than replace them.
The relentless drive toward achieving human-like robotic proficiency sets the stage for a future where robotics merge seamlessly into everyday life, complemented by intelligent, adaptable machines. The journey is ongoing, marked by both challenges and exhilarating prospects, as the potential for enhanced collaboration between human and machine unfolds before us.