Robots have the potential to assist humans in various real-world settings by effectively and dexterously manipulating different objects. The need for cost-effective robotic grippers that can mimic human hands is crucial for enabling robots to perform tasks with precision. Recently, a team of researchers from Improbable AI Lab and Massachusetts Institute of Technology (MIT) introduced a new two-finger robotic gripper designed to handle everyday manipulation tasks more efficiently.
Robotic Finger Design
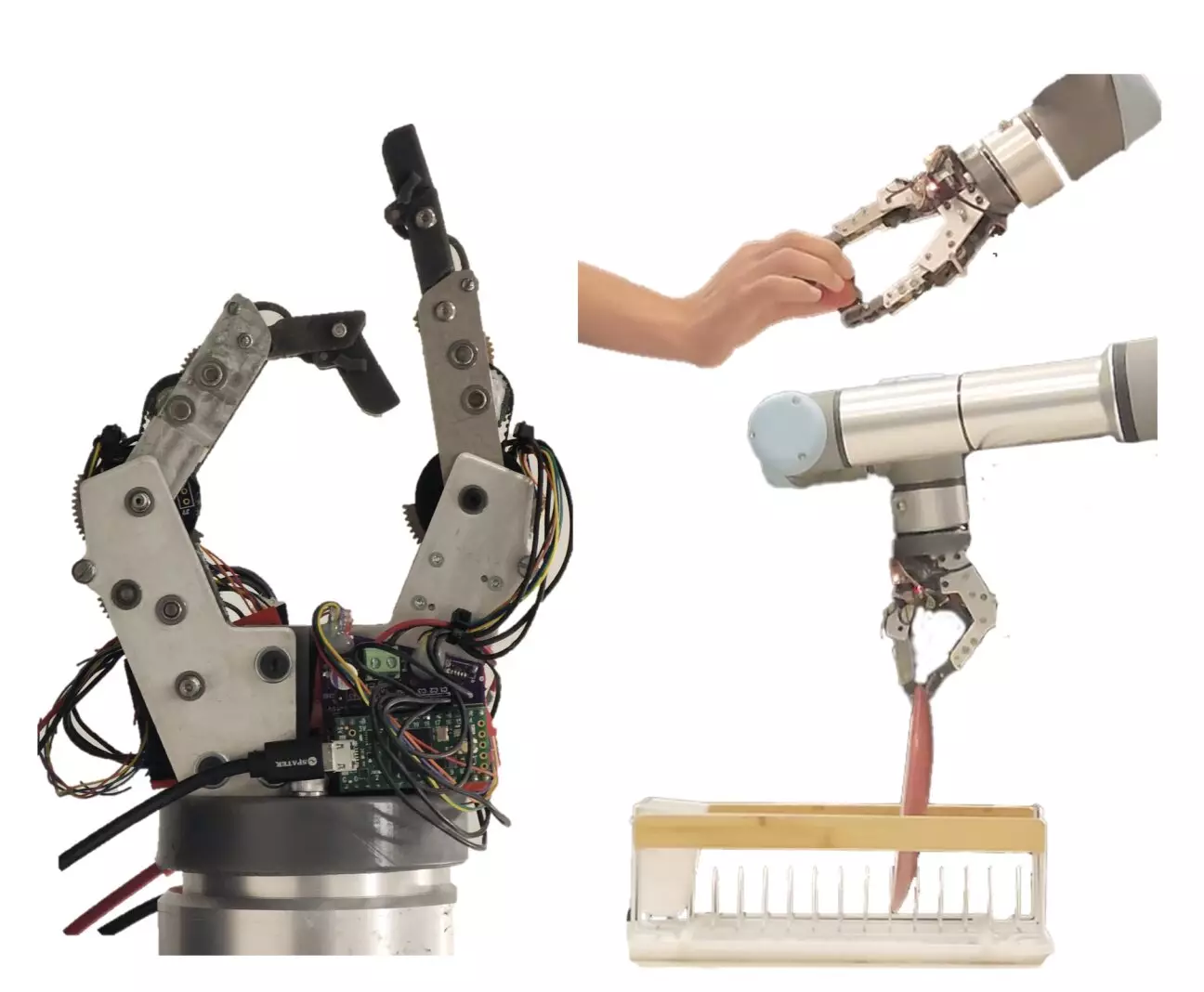
The robotic gripper developed by the researchers consists of a compact structure with two robotic fingers that resemble human fingers in size and shape. These fingers are capable of bending and grasping objects with different shapes and textures. The team’s focus was on creating a gripper that could perform simple everyday tasks such as picking up objects and placing them in specific locations. They emphasized the importance of designing fingers that are as compact as possible while still meeting the performance requirements.
While the current two-finger gripper has only 2 degrees of freedom (DoF), the researchers are hopeful about expanding the design to incorporate more fingers in the future. They acknowledge that adding a third DoF could increase the size of the palm, making it challenging to fit five fingers onto a hand. However, they believe that a hand with three or four fingers is feasible, with the potential for a full five-finger hand when more torque-dense actuators become available.
To assess the performance of their two-finger gripper, the researchers conducted a series of real-world experiments. These experiments involved testing the speed, compliance, and force applied by the gripper while completing basic pick-and-place tasks. The team evaluated the gripper’s performance by having it pick and place dishes in a rack, handle thin and flat objects like paper, and delicately grasp items such as strawberries. The results of the experiments demonstrated the gripper’s ability to successfully accomplish these tasks, indicating its potential for use in basic household robots.
The development of a two-finger robotic gripper by researchers at Improbable AI Lab and MIT presents a significant advancement in the field of robotics. The gripper’s human-like fingers and compact design make it well-suited for everyday object manipulation tasks. While the current iteration has shown promise in handling basic tasks, further improvements and testing on a wider range of tasks could enhance its performance and usability in real-world scenarios. Overall, the two-finger gripper opens up possibilities for the development of more advanced robotic systems capable of assisting humans in various tasks.