The concept of self-driving vehicles has been a long-standing goal within both the robotics research and automotive industries. While there have been significant investments in the development of autonomous vehicles, their deployment has been limited to specific settings. Recently, researchers have started exploring the potential of automated valet parking (AVP), a feature that would enable a car to navigate from the parking entrance to an available parking spot without human intervention. Despite the growing interest in this autonomous driving application, the successful implementation of AVP has presented challenges that researchers are working to overcome.
In a recent development, a team of researchers at Mach Drive in Shanghai introduced OCEAN, an Openspace Collision-freE trAjectory plaNner designed for autonomous parking. This innovative planner, detailed in a pre-published paper on arXiv, has shown significant advancements in enabling vehicles to safely navigate to a parking spot without encountering obstacles. OCEAN utilizes an optimization-based trajectory planning approach accelerated by the Alternating Direction Method of Multiplier (ADMM) to enhance computational efficiency and effectiveness, making it suitable for various scenarios with minimal dynamic obstacles.
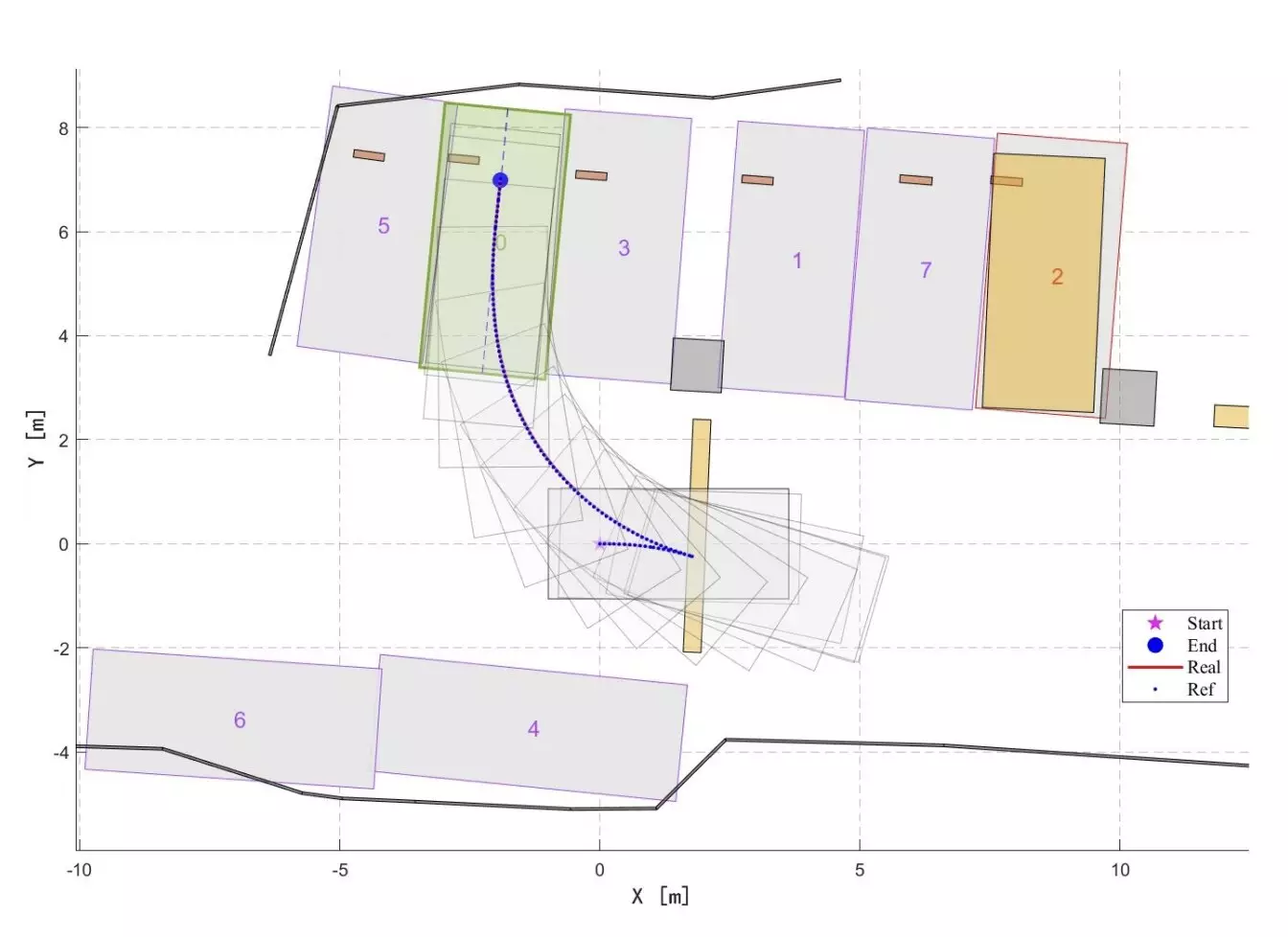
The OCEAN planner addresses key limitations observed in previous studies on autonomous parking, particularly in accurately predicting collisions and performing efficiently in real-time scenarios. By building upon the Hybrid Optimization-based Collision Avoidance (H-OBCA) framework, the researchers have significantly improved collision avoidance, robustness, and speed of the trajectory planning process. The utilization of ADMM to handle optimization variables in different problem groups, such as Quadratic Programming (QP) and Second Order Cone Programming (SOCP), has enhanced the planner’s overall performance and reliability.
Upon extensive testing in simulated scenarios and real-world experiments in public parking lots, the OCEAN planner demonstrated superior performance compared to existing methods for autonomous parking. The researchers reported promising results, indicating the feasibility of deploying the planner on low-computing platforms requiring real-time capabilities. While the current version of the planner has shown significant potential, further enhancements and real-world trials are necessary to validate its performance and applicability across different environments. Automotive companies could potentially adopt this cutting-edge technology in the future, paving the way for widespread deployment of automated vehicle parking solutions.
The development of OCEAN represents a significant milestone in the advancement of automated vehicle parking technologies. By addressing critical challenges in autonomous parking and demonstrating improved performance, the planner offers a promising solution for the seamless integration of self-driving capabilities in real-world scenarios. With ongoing research and development efforts, the future of autonomous driving looks brighter, with innovations like OCEAN driving the evolution of smart and efficient transportation systems.